H-Bridge Configuration
The designation “H-Bridge” originates from the layout of the switching circuit responsible for managing the motor’s motion. It is often identified as the “Full Bridge.” There are four switching elements present in this circuit. The construction of H-bridges is achievable through the utilization of transistors, MOSFETs, and similar devices. Although it will be economical, there is a proposal to increase the dimensions of the design and the circuit board, which is often not preferred. Consequently, we can consider using a small 16-pin IC for this purpose.
Operation of H-bridge Circuit
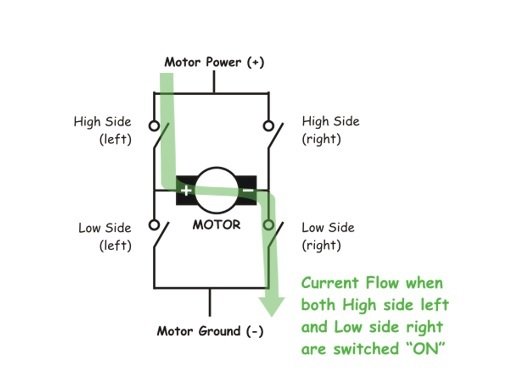
The figure illustrates four switching elements identified as follows:
- High side left
- High side right
- Low side right
- Low side left

Activating these switches in pairs results in a corresponding change in the motor’s direction. When we enable “High side left” and “Low side right,” the motor will turn in a forward direction. This occurs because the current from the power supply flows through the motor coil and is directed to ground through the switch located on the low side (right). The figure below demonstrates this.
Likewise, when we engage the low side (left) and the high side (right), the current reverses its flow, leading to the motor turning in the opposite direction. This describes the essential functioning of an H-Bridge. A brief truth table can also be created based on the H-Bridge switching mechanism described earlier.
High Left | High Right | Low Left | Low Right | Description |
On | Off | Off | On | Motor runs clockwise |
Off | On | On | Off | Motor runs anti-clockwise |
On | On | Off | Off | Motor stops or decelerates |
Off | Off | On | On | Motor stops or decelerates |
Table : Working of H-bridge circuit
Connecting a DC Motor to the 8051 Microcontroller
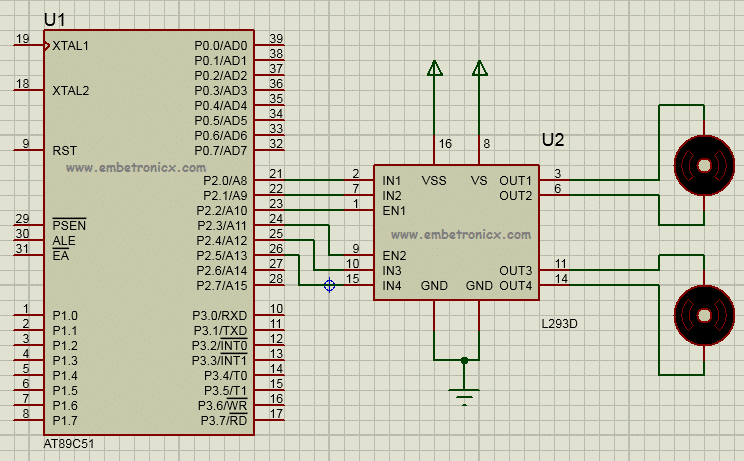
Schematic Representation of the Circuit
- Input 1 – Port 2.0
- Input 2 – Port 2.1
- Enable 1 – Port 2.2
- Enable 2 – Port 2.3
- Input 3 – Port 2.4
- Input 4 – Port 2.5
Procedure
Forward
- EN Pin High (En1 = 1 or En2 = 1)
- Input 1 or Input 3 Pin High (In1 = 1 or In3=1)
- Input 2 or Input 4 Pin Low (In2 = 0 or In4 = 0)
Reverse
- EN Pin High (En1 = 1 or En2 = 1)
- Input 1 or Input 3 Pin Low (In1 = 0 or In3=0)
- Input 2 or Input 4 Pin Low (In2 = 1 or In4 = 1)
Code
This code instructs the first motor to move forward, whereas the second motor is designated to move in the reverse direction.