Overview of FreeRTOS
FreeRTOS is a microcontroller-specific Real-Time Operating System that is lightweight. It offers synchronization methods, time services, task scheduling, and inter-task communication—all of which are lacking from the conventional Arduino loop-based method. FreeRTOS is the perfect tool for projects that are more complicated (such as multitasking with sensors, communication modules, and displays).
When to Use Arduino with FreeRTOS
FreeRTOS should be taken into account when: Multiple processes (such as sensor polling, data logging, and communication) must run “simultaneously” in order to achieve concurrency. Without interfering with other tasks, precise timing or delays are necessary. Using millis() or delay() makes cooperative multitasking challenging. For intricate projects like wearable technology or Internet of Things nodes, scalability is crucial. Examples: An OLED display is being updated by a temperature logger that sends recurring MQTT messages via Wi-Fi. A robot that simultaneously performs telemetry, obstacle detection, and motor control
Boards Supported
Numerous Arduino-compatible boards, such as the following, may run
FreeRTOS:
ESP32 (native support with built-in FreeRTOS and dual-core) Arduino Uno, Mega, or Nano (via FreeRTOS libraries; nevertheless, the quantity of jobs is restricted by RAM) Arduino Due/STM32 (suited for more advanced FreeRTOS use, with additional RAM and performance)
How to Configure Arduino with FreeRTOS
1.Set up the FreeRTOS Library for AVR-based boards, such as the Mega and Uno:
Launch the Arduino IDE. Navigate to the Library Manager. Look up “FreeRTOS” → Install “Arduino_FreeRTOS_Library” or “FreeRTOS by Richard Barry.” FreeRTOS is pre-installed on the Tasks can be used directly.
2. Fundamental FreeRTOS Ideas:
Lightweight threads are the task. made using the xTaskCreate() function. Delays: delay() is replaced by vTaskDelay(). Queues and semaphores are used to protect resources and facilitate inter-task communication. Task execution is managed by the scheduler. started on the AVR using vTaskStartScheduler(); on the ESP32, it starts automatically.
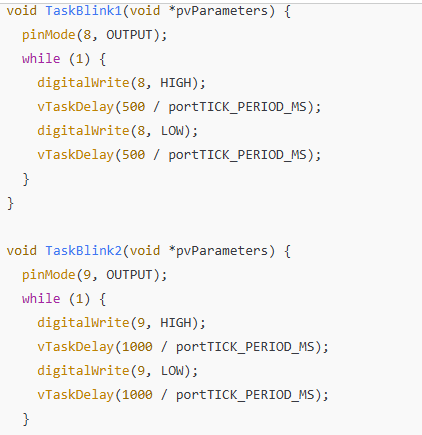
Example: Using Tasks (AVR/Uno) to Blink Two LEDs

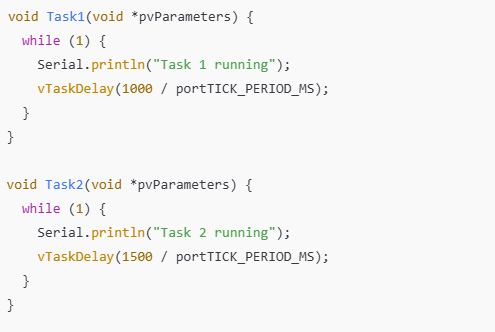
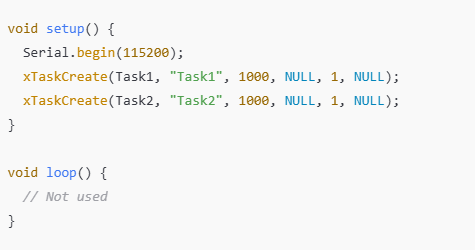
For instance, ESP32 FreeRTOS Tasks
Advice and Ideal Procedures
Keep things brief: Steer clear of lengthy blocking processes. To keep the scheduler from being blocked, use vTaskDelay() rather than delay(). Utilize synchronization primitives (such as Serial or I2C) when utilizing shared resources. On AVR devices with little RAM, keep a close eye on heap and memory utilization.
Debugging and Tracking
Use of the uxTaskGetStackHighWaterMark () stack. When possible, use FreeRTOS traces tools (such as Segger SystemView for ARM). To comprehend the flow of task execution, enable serial logs.
Conclusion
Real-time multitasking features provided
by FreeRTOS enhance the structure, responsiveness, and dependability of Arduino projects. It is particularly helpful when switching from basic sketches to scalable embedded applications or when managing multiple activities at once.
