What is AUTOSAR?
AUTOSAR stands for Automotive Open System Architecture. It is a worldwide development partnership established in 2003 by leading automobile manufacturers, automotive suppliers, semiconductor companies, and software vendors.
The primary goal of AUTOSAR is to create a standardized software architecture that allows automotive software to be portable, scalable, and reusable across different vehicle platforms.
Before AUTOSAR, every manufacturer typically developed its own proprietary software framework. This often resulted in compatibility issues when integrating software from multiple suppliers. Developers spent considerable time adapting software to specific hardware platforms rather than focusing on innovation.
AUTOSAR changed this approach by introducing standardized interfaces and development methodologies. As a result, automotive companies can now reuse software components, reduce development costs, and accelerate vehicle development cycles.
Why AUTOSAR Became Essential in Modern Vehicles
The automotive industry is undergoing a major transformation driven by:
- Electric Vehicles (EVs)
- Connected Cars
- Autonomous Driving Systems
- Advanced Driver Assistance Systems (ADAS)
- Vehicle-to-Everything (V2X) Communication
Each of these technologies requires sophisticated software that must operate reliably under strict safety requirements.
Without a common architecture, integrating hundreds of software modules developed by different teams would be extremely difficult. AUTOSAR provides a structured framework that enables seamless collaboration between manufacturers and suppliers while maintaining software quality and reliability.
This standardization has become one of the key reasons why modern automotive software development can scale effectively across multiple vehicle platforms.
AUTOSAR Layered Architecture Explained
One of the most important concepts in AUTOSAR is its layered architecture. This architecture separates software functionality into distinct layers, making systems easier to develop, test, maintain, and reuse.
AUTOSAR Architecture Overview
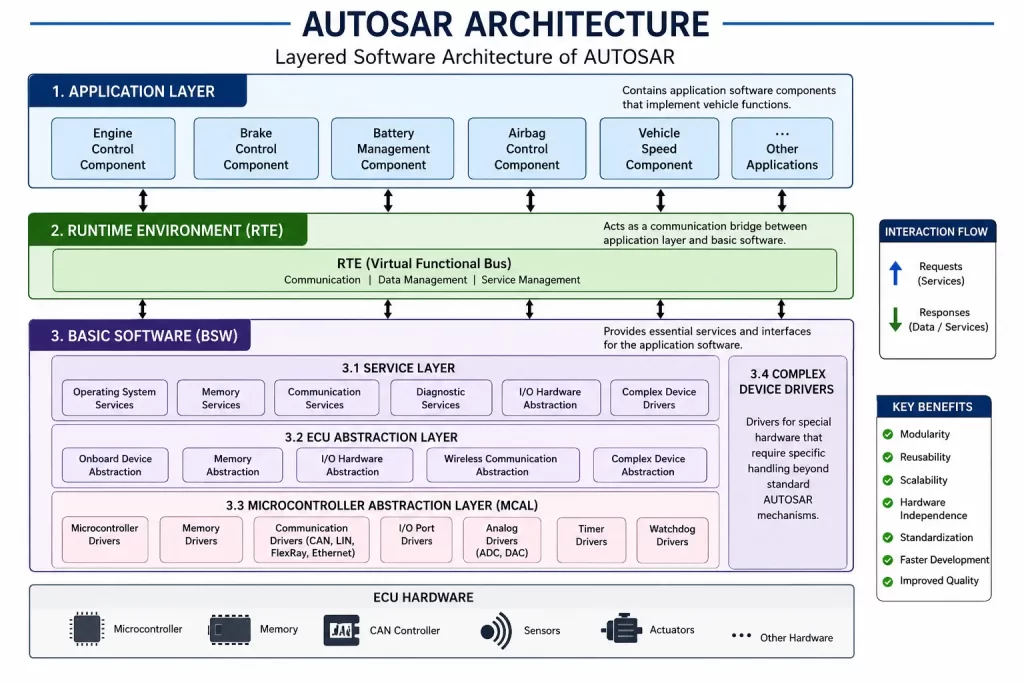
The AUTOSAR architecture consists of three major layers:
Application Layer
The Application Layer contains software components that implement actual vehicle functions.
Examples include:
- Engine Control
- Battery Management
- Airbag Systems
- Climate Control
- Steering Functions
- Vehicle Speed Monitoring
Each function is developed as an independent software component. This modular design allows developers to modify or update individual features without affecting the entire system.
For example, a battery management module used in one electric vehicle can often be reused in another vehicle with minimal changes.
This approach significantly improves software reusability and reduces development effort.
Runtime Environment (RTE)
The Runtime Environment (RTE) acts as a communication bridge between software applications and lower-level system services.
Rather than allowing application software to communicate directly with hardware, AUTOSAR introduces the RTE as an intermediary layer.
The RTE:
- Transfers data between software components
- Handles service requests
- Manages communication
- Provides abstraction from hardware
Because of this abstraction, developers can focus on application functionality without worrying about hardware-specific implementation details.
The RTE is often described as the “central nervous system” of AUTOSAR because it connects all software components together.
Basic Software (BSW)
The Basic Software (BSW) layer provides essential system services required for ECU operation.
This layer is responsible for communication, diagnostics, memory management, operating system support, and hardware interaction.
BSW is further divided into several sub-layers.
Service Layer
The Service Layer provides common services such as:
- Operating System Support
- Communication Services
- Diagnostic Services
- Memory Services
- Network Management
These services are used throughout the ECU and are independent of vehicle functions.
ECU Abstraction Layer
The ECU Abstraction Layer hides hardware-specific details from higher software layers.
It provides standardized access to:
- Sensors
- Actuators
- External Devices
- Peripheral Components
As a result, applications remain portable even when hardware changes.
Microcontroller Abstraction Layer (MCAL)
The MCAL directly interfaces with microcontroller hardware.
Typical drivers include:
- ADC Drivers
- PWM Drivers
- CAN Drivers
- LIN Drivers
- SPI Drivers
- GPIO Drivers
- Timer Drivers
MCAL ensures that higher software layers can access hardware through standardized interfaces.
Complex Device Drivers
Some hardware requires special handling beyond standard AUTOSAR services.
Examples include:
- High-speed sensor interfaces
- Specialized motor control systems
- Custom hardware accelerators
Complex Device Drivers enable support for such components while maintaining integration within the AUTOSAR ecosystem.
AUTOSAR Software Components
Software Components are the functional building blocks of AUTOSAR applications.
Each component performs a specific task and communicates using predefined interfaces.
Examples include:
- Engine Control Software
- Brake Control Module
- Battery Monitoring System
- Cruise Control System
- Airbag Controller
Because these components are hardware-independent, they can be reused across multiple vehicle platforms, significantly reducing development costs.
Ports and Interfaces in AUTOSAR
Communication between software components occurs through Ports and Interfaces.
Think of ports as connection sockets and interfaces as communication rules.
This approach provides:
- Standardized communication
- Better modularity
- Easier integration
- Improved maintainability
Since all communication follows predefined standards, software from different suppliers can work together seamlessly.
Virtual Functional Bus (VFB)
The Virtual Functional Bus (VFB) is a conceptual communication model used during AUTOSAR system design.
Developers view software components as if they are connected through a virtual communication network.
This abstraction allows engineers to design system functionality without worrying about the physical location of ECUs within the vehicle.
Benefits include:
- Simplified development
- Better scalability
- Improved software portability
- Easier integration
The VFB plays a crucial role in enabling AUTOSAR software reuse.
AUTOSAR Communication Protocols
Modern vehicles rely on multiple communication networks.
AUTOSAR provides standardized support for:
- Controller Area Network (CAN)
- Local Interconnect Network (LIN)
- FlexRay
- Automotive Ethernet
This unified communication framework allows software applications to exchange data without depending on the underlying network technology.
As a result, software remains flexible and portable across different vehicle architectures.
AUTOSAR Operating System
The AUTOSAR Operating System is specifically designed for real-time automotive applications.
Its responsibilities include:
- Task Scheduling
- Interrupt Handling
- Event Management
- Resource Allocation
- Timing Control
Automotive systems often perform safety-critical functions where delayed responses are unacceptable.
The AUTOSAR OS ensures deterministic behavior, guaranteeing that critical tasks execute within required time limits.
AUTOSAR Classic Platform vs Adaptive Platform
Classic Platform
The AUTOSAR Classic Platform is designed for traditional embedded automotive systems that require deterministic behavior and strict real-time performance.
Common applications include:
- Engine Control Units
- Transmission Controllers
- ABS Systems
- Airbag Controllers
- Body Electronics
Adaptive Platform
The AUTOSAR Adaptive Platform addresses the needs of next-generation software-defined vehicles.
It supports:
- Autonomous Driving
- Vehicle Connectivity
- Cloud Integration
- Over-the-Air Updates
- Service-Oriented Architectures
The Adaptive Platform provides greater flexibility and computational capability for modern automotive applications.

Benefits of AUTOSAR
Organizations adopting AUTOSAR gain several advantages:
- Software Reusability
- Software components can be reused across vehicle platforms, reducing development effort.
- Faster Development
- Standardized interfaces shorten integration and testing cycles.
- Improved Reliability
- Consistent development practices improve software quality.
- Hardware Independence
- Applications remain portable across different hardware platforms.
- Better Supplier Collaboration
- Manufacturers and suppliers can integrate software more efficiently using common standards.
- Scalability
- AUTOSAR supports everything from simple ECUs to advanced autonomous vehicle systems.
The Future of AUTOSAR
The future of the automotive industry is increasingly software-driven. Electric vehicles, autonomous driving technologies, connected mobility solutions, and cloud-enabled services are rapidly becoming standard vehicle features.
As software complexity continues to grow, the need for robust and standardized architectures becomes even more important.
AUTOSAR has established itself as the foundation for modern automotive software development by providing modularity, portability, interoperability, and scalability.
For engineers entering the automotive embedded systems field, understanding AUTOSAR fundamentals is no longer optional—it is becoming an essential skill for developing next-generation automotive technologies.
Real-World Applications of AUTOSAR
AUTOSAR has become an integral part of modern vehicle development and is widely used across various automotive domains. Its standardized architecture allows manufacturers and suppliers to develop reliable software that can be reused across multiple vehicle platforms.
Some common applications of AUTOSAR include:
- Engine Management Systems
- Battery Management Systems (BMS)
- Anti-lock Braking Systems (ABS)
- Electronic Stability Control (ESC)
- Airbag Control Units
- Advanced Driver Assistance Systems (ADAS)
- Vehicle Connectivity Solutions
- Infotainment Systems
- Autonomous Driving Platforms
As automotive technology advances, AUTOSAR continues to support increasingly sophisticated vehicle functions while ensuring software interoperability and reliability.
Challenges of Implementing AUTOSAR
While AUTOSAR offers significant advantages, implementing it can present several challenges, particularly for teams new to automotive software standards.
One of the primary challenges is the steep learning curve associated with understanding AUTOSAR architecture, configuration processes, and development workflows. Engineers often need a strong foundation in embedded systems, automotive communication protocols, and software engineering principles before working effectively with AUTOSAR.
Another challenge is the extensive configuration required during development. Unlike traditional embedded applications, AUTOSAR projects involve numerous configuration files, communication mappings, software component definitions, and hardware abstraction settings.
Organizations may also face additional costs related to AUTOSAR development tools, training, and system integration. However, these initial investments are often justified by long-term benefits such as software reuse, reduced maintenance effort, and improved development efficiency.
Career Opportunities in AUTOSAR
The growing adoption of electric vehicles, connected vehicles, and autonomous driving technologies has created a strong demand for AUTOSAR professionals worldwide. Automotive manufacturers and Tier-1 suppliers actively seek engineers with expertise in AUTOSAR-based software development.
Popular career roles include:
- AUTOSAR Developer
- Embedded Software Engineer
- Automotive Software Engineer
- Basic Software (BSW) Engineer
- MCAL Developer
- RTE Developer
- ECU Integration Engineer
- Functional Safety Engineer
- Automotive Systems Engineer
Professionals with AUTOSAR knowledge often work on advanced vehicle technologies, making it a valuable skill for engineers pursuing careers in the automotive embedded systems industry.
Conclusion
AUTOSAR has revolutionized automotive software development by introducing a standardized and scalable architecture that simplifies the creation of complex vehicle systems. Through its layered design, software component model, Runtime Environment (RTE), and Basic Software (BSW) framework, AUTOSAR enables developers to build reliable, reusable, and hardware-independent automotive applications.
From traditional engine control units to modern autonomous driving platforms, AUTOSAR continues to play a critical role in supporting innovation across the automotive industry. As vehicles become increasingly connected, intelligent, and software-driven, the importance of AUTOSAR will only continue to grow.
For engineers, students, and automotive professionals, learning AUTOSAR fundamentals provides a strong foundation for understanding modern vehicle software architecture and preparing for future opportunities in automotive software development.

