What Is Automotive Ethernet?
Automotive Ethernet is a vehicle-grade implementation of standard Ethernet technology designed specifically for in-vehicle communication.
It connects ECUs, sensors, cameras, infotainment systems, and centralized controllers using IP-based networking.
Unlike traditional automotive communication buses, automotive Ethernet supports data rates from 100 Mbps up to multi-gigabit speeds,
making it a key enabler for next-generation vehicle features such as:
- High-resolution camera and radar streaming
- Sensor fusion for ADAS and autonomous driving
- Over-the-Air (OTA) software updates
- High-speed infotainment and vehicle connectivity
Why Automotive Ethernet Is Replacing CAN and FlexRay
| Requirement | CAN | FlexRay | Automotive Ethernet |
|---|
| Maximum bandwidth | 1 Mbps | 10 Mbps | 100 Mbps – 10 Gbps |
| Camera & video streaming | Not possible | Limited | Fully supported |
| OTA software updates | Very slow | Slow | High-speed |
| Sensor fusion | Limited | Moderate | Real-time capable |
| Zonal architecture support | No | No | Native support |
| Scalability & future-proofing | Limited | Medium | Excellent |
Automotive Ethernet is the only in-vehicle communication technology that scales with future vehicle requirements.

Automotive Ethernet Architecture: OSI and TCP/IP Models Explained
To work effectively with automotive Ethernet, engineers must understand its layered communication architecture.
Layered models divide complex communication tasks into manageable functional blocks.
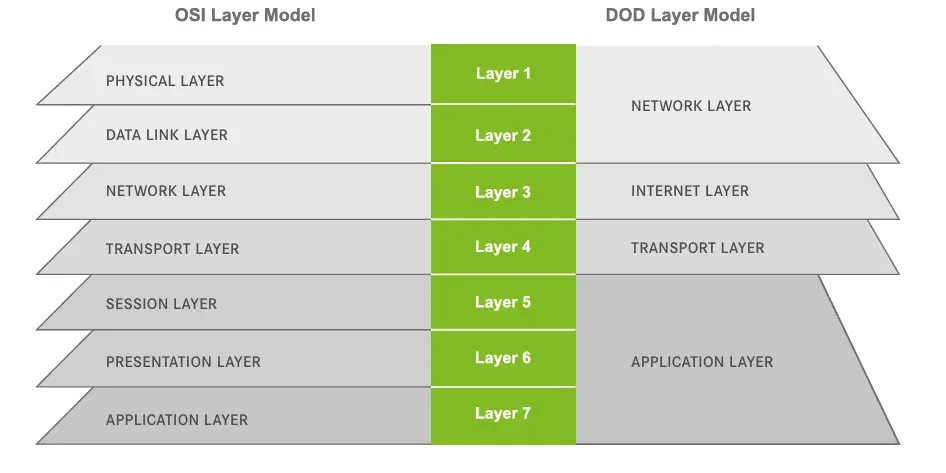
Two models are commonly referenced:
- OSI Model – A conceptual 7-layer communication model
- DoD / TCP-IP Model – A practical implementation model used in real systems
Layer-by-Layer Automotive Ethernet Design
Layer 1 – Physical Layer (OSI)
The Physical Layer defines how digital data is transmitted over the physical medium.
In automotive Ethernet, this includes:
- Single-pair twisted cables (100BASE-T1, 1000BASE-T1)
- Automotive-grade PHY transceivers
- EMI-resistant shielding
- Rugged connectors for vibration and temperature extremes
This layer focuses purely on bit transmission without interpreting the data.
Layer 2 – Data Link Layer (OSI)
The Data Link Layer manages communication between devices on the same network segment.
Its responsibilities include:
- Ethernet frame formatting
- MAC addressing
- Error detection using CRC
- Media access control
Layer 3 – Network Layer (OSI) / Internet Layer (DoD)
This layer handles logical addressing and routing across the vehicle network.
Functions include:
- IP addressing
- Packet routing between domains and zones
- Scalable in-vehicle networking
Layer 4 – Transport Layer (OSI & DoD)
The Transport Layer ensures reliable or real-time end-to-end communication.
- TCP – Reliable, ordered delivery (used for diagnostics and OTA updates)
- UDP – Low-latency transmission (used for ADAS and sensor data)
Layer 5 – Session Layer (OSI)
The Session Layer manages session establishment, maintenance, and termination.
In automotive systems, these functions are typically integrated into higher-level protocols.
Layer 6 – Presentation Layer (OSI)
This layer ensures that data is correctly:
- Formatted
- Compressed or decompressed
- Encrypted or decrypted
Layer 7 – Application Layer (OSI & DoD)
The Application Layer provides network services directly to vehicle applications, including:
- Diagnostics
- Configuration
- Service discovery
- Data exchange
In the DoD model, OSI Layers 5, 6, and 7 are combined into a single Application Layer.
OSI and DoD Model Relationship
- OSI Layers 1–2 → DoD Network Access Layer
- OSI Layer 3 → DoD Internet Layer
- OSI Layer 4 → DoD Transport Layer
- OSI Layers 5–7 → DoD Application Layer

Automotive Ethernet Protocol Stack
| Protocol | Function |
|---|
| Ethernet PHY & MAC | Physical transmission and framing |
| IP | Logical addressing and routing |
| TCP / UDP | Transport services |
| SOME/IP | Service-oriented middleware |
| DoIP | Diagnostics over IP |
| TSN | Deterministic real-time communication |
Real-World Automotive Ethernet Applications
BMW – ADAS Camera Backbone Network
BMW uses automotive Ethernet to connect front, rear, and surround-view cameras to ADAS domain controllers.
How it works:
- Cameras stream HD video over automotive Ethernet
- Central ECU performs lane detection and collision avoidance
- TSN ensures latency remains within a few milliseconds
Without automotive Ethernet, real-time multi-camera processing would not be feasible.
Tesla – Centralized and Zonal Vehicle Architecture
Tesla’s vehicle architecture is built almost entirely around automotive Ethernet.
Practical usage:
- All domain and zonal controllers communicate via Ethernet
- OTA updates are deployed simultaneously across ECUs
- Infotainment, ADAS, and powertrain share a high-speed backbone
This architecture enables Tesla’s rapid software innovation.
Bosch – Radar and LiDAR Sensor Fusion
Bosch uses automotive Ethernet in advanced sensor fusion platforms.
Industry scenario:
- Radar sends raw data via Ethernet
- LiDAR transmits point-cloud data
- Fusion ECU creates real-time 3D environment models
This technology is fundamental for autonomous emergency braking systems.
Mercedes-Benz – High-Speed Infotainment Systems
Luxury Mercedes models rely on automotive Ethernet for multimedia networking.
Real implementation:
- Rear-seat displays stream HD content
- Navigation data syncs with cloud services
- Audio and video remain jitter-free while driving
Continental – Central Gateway ECUs
Continental’s central gateway ECUs are Ethernet-based.
Key roles:
- Backbone between body, chassis, ADAS, and infotainment domains
- Diagnostics using DoIP
- Fast fault logging and predictive maintenance
Why the Automotive Industry Is Moving to Ethernet
| Requirement | Traditional Bus Systems | Automotive Ethernet |
|---|
| High-bandwidth sensors | No | Yes |
| OTA updates | Limited | High-speed |
| Real-time determinism | Limited | With TSN |
| Zonal architectures | Not scalable | Designed for it |
| Future autonomous systems | Not suitable | Essential |

Key Takeaways
- Automotive Ethernet is the backbone of modern vehicle networks
- It enables ADAS, sensor fusion, infotainment, and OTA updates
- TSN makes Ethernet suitable for real-time automotive systems
- Zonal and centralized architectures depend on Ethernet scalability
- OEMs like BMW, Tesla, Mercedes, Bosch, and Continental rely on it