Concept of Obstacle Avoidance in Robotics
An obstacle avoidance robot continuously monitors its surroundings and reacts whenever it detects an object nearby. Distance data collected from an Ultrasonic sensor is processed by the STM32F401RE microcontroller, which determines whether the robot should move forward, turn, or stop.
This obstacle avoidance approach is widely used in:
- Autonomous mobile robots
- Industrial robotic platforms
- Service and domestic robots
- Educational robotics projects
The STM32F401RE microcontroller ensures fast decision-making and precise motor control, which is essential for smooth and reliable obstacle avoidance behavior.

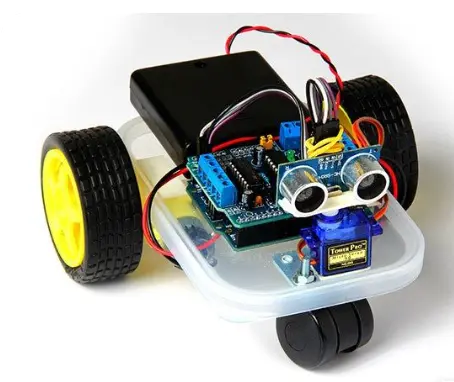
System Overview of the Obstacle Avoidance Robot
The obstacle avoidance robot consists of multiple hardware components working together to achieve autonomous navigation.
Main Components and Their Functions
- STM32F401RE microcontroller – Processes sensor data and controls motor movement
- Ultrasonic sensor (HC-SR04) – Measures distance to nearby obstacles
- DC motors and motor driver – Provides motion and directional control
- Chassis – Mechanical support for robot assembly
- Power supply – Battery or USB source
The Ultrasonic sensor continuously measures the distance in front of the robot. When an obstacle is detected within a predefined range, the STM32F401RE microcontroller commands the motors to turn, allowing the robot to navigate safely.
Working Principle of the Obstacle Avoidance System
The obstacle avoidance system operates in a closed-loop control manner:
- The Ultrasonic sensor emits high-frequency sound waves
- Reflected waves return to the sensor’s echo pin
- The STM32F401RE microcontroller calculates distance using the echo time
- Motor direction is adjusted if an obstacle is detected too close
This real-time process enables the robot to operate independently, with the STM32F401RE microcontroller handling sensing, computation, and motor control efficiently.
Hardware Components Used
STM32F401RE Microcontroller
The STM32F401RE microcontroller acts as the brain of the robot. Its ARM Cortex-M4 core provides sufficient processing power for real-time sensor handling and motor control.
- Multiple GPIO pins
- Timers and PWM channels
- SPI, I2C, and UART interfaces
- Efficient real-time performance
Due to these features, the STM32F401RE microcontroller is widely used in embedded robotics applications.
Ultrasonic Sensor
The Ultrasonic sensor performs distance measurement by transmitting and receiving sound waves. It provides accurate short-range obstacle detection, making it suitable for mobile robots.
Motor Driver and DC Motors
The motor driver interfaces with the STM32F401RE microcontroller to control the speed and direction of DC motors based on obstacle detection results.

Development Environment Configuration
STM32CubeIDE is used to program the STM32F401RE microcontroller and configure peripherals for the obstacle avoidance robot.
- Install STM32CubeIDE
- Create a new project for the STM32F401RE microcontroller
- Configure GPIO, timers, and PWM using STM32CubeMX
This setup enables efficient coding, debugging, and testing for embedded robotics projects.
Ultrasonic Sensor and Motor Interfacing
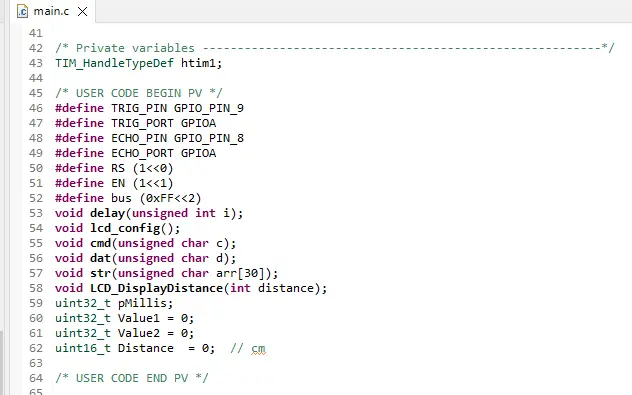
Ultrasonic Sensor Connections
- VCC connected to power supply
- Trig pin connected to STM32 GPIO output
- Echo pin connected to STM32 GPIO input
- Common ground shared with controller
Motor Driver Connections
- Control pins connected to STM32 GPIO
- Motor power supplied externally
- Ground shared with the STM32F401RE microcontroller
Proper interfacing ensures accurate sensing and stable motor operation.
Firmware Logic for Obstacle Detection
The firmware running on the STM32F401RE microcontroller follows a simple control sequence:
- Trigger the Ultrasonic sensor
- Measure echo pulse duration
- Calculate distance
- Compare with threshold value
- Control motor direction
This logic runs continuously, enabling real-time obstacle avoidance.
Testing and Calibration
Testing and calibration are essential to ensure reliable obstacle avoidance performance.
- Test motor movement in open space
- Place obstacles at varying distances
- Adjust threshold distance values
- Fine-tune turning delays
Calibration improves accuracy and allows the STM32F401RE microcontroller to respond effectively to sensor data.

Applications of STM32F401RE in Robotics
- Autonomous Mobile Robots – Used in robotic cars and drones requiring real-time processing
- Industrial Robotics – Supports precise motor control and automation systems
- Service and Educational Robots – Ideal for learning platforms and service robots using Ultrasonic sensors
Summary
- Obstacle avoidance is a critical function in autonomous robots
- The STM32F401RE microcontroller provides reliable real-time control
- The Ultrasonic sensor enables accurate distance measurement
- Sensor processing and motor control are handled efficiently
This design forms a strong foundation for building advanced robotics and autonomous navigation systems.