What Is Hardware Software Co Design?
To understand what is hardware software co design, think of it as designing the processor, memory architecture, firmware, RTOS behavior, communication protocols, and application logic at the same time.
Instead of building firmware after finalizing hardware, engineers evaluate:
- Which tasks should run in software
- Which functions need hardware acceleration
- Where latency must be minimized
- How power can be reduced
- Which interfaces need deterministic timing
- How AI inference can run at the edge
This collaborative process improves embedded system architecture design by ensuring both domains complement each other from the start.
Simple Example
In a smart surveillance camera:
- Image capture and sensor control → software
- AI object detection acceleration → hardware NPU / FPGA
- Streaming + network stack → software
- Compression engine → dedicated hardware block
This is one of the best hardware software codesign examples used in real products.

Hardware vs Software Task Partition in Embedded Systems
One of the most important decisions in hardware software codesign in embedded systems is identifying which functions should run in dedicated hardware and which should remain in software. This process is known as task partitioning, and it directly affects system speed, power efficiency, cost, and scalability.
The table below shows how common embedded tasks are typically divided for better performance.
Task | Best in Hardware | Best in Software |
Signal processing | FPGA / DSP accelerator | Algorithm tuning and control flow |
UI logic | Display controller | Firmware / Embedded Linux |
AI inference | NPU / FPGA | TinyML framework integration |
Communication stack | MAC / PHY hardware blocks | TCP/IP, BLE, CAN protocol stack |
Motor control | PWM timers, encoder interfaces | Control algorithm and diagnostics |
Sensor acquisition | ADC, DMA, interrupt controllers | Calibration and filtering logic |
Security | Secure element, crypto engine | Authentication and key management |
This hardware-software split helps engineers reduce processor overhead while improving deterministic behavior in real-time embedded systems.
For example, in an automotive control unit, PWM generation is usually hardware-driven for precise timing, while the decision-making control algorithm runs in software for flexibility.
This balance is the foundation of efficient embedded system architecture design.
The biggest strength of co design in embedded systems is that it improves the full product lifecycle.
1) Better Performance
High-speed tasks like DSP filtering, neural network inference, cryptography, and motor control loops perform better when shifted into dedicated hardware accelerators.
This reduces CPU overhead and improves deterministic timing.
2) Lower Power Consumption
Battery-powered IoT devices and wearables rely on optimized partitioning between hardware and firmware.
For example:
- Sensor polling in software wastes CPU cycles
- Dedicated interrupt-driven hardware reduces wake time
- DMA transfers reduce processor load
- AI accelerators perform inference at lower energy
3) Faster Development
Parallel hardware and firmware validation reduces iteration loops.
Instead of waiting for PCB prototypes, teams use:
- virtual platforms
- FPGA emulation
- software-in-loop testing
- hardware-in-loop simulations
4) Better Scalability
The same design can scale from MCU to SoC platforms.
This makes hw sw co design extremely useful for product families.
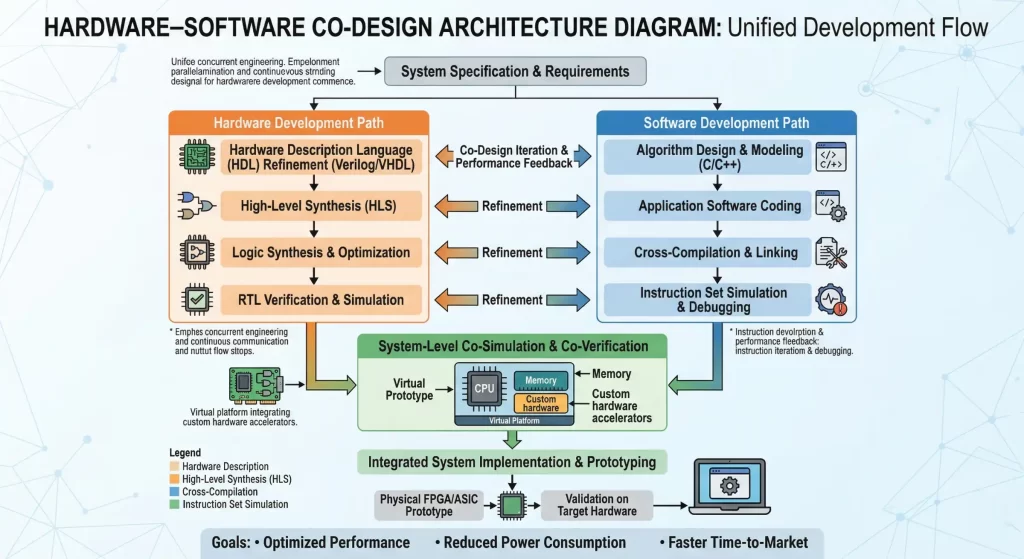
Practical Introduction to Co-Design Workflow
A practical introduction to hardware software codesign usually follows these phases:
Stage | Hardware Focus | Software Focus |
Requirement analysis | MCU, FPGA, memory, interfaces | RTOS, drivers, middleware |
Partitioning | accelerator blocks, bus design | scheduling, APIs |
Modeling | HDL / system-level models | C/C++, Python simulation |
Prototyping | FPGA / virtual SoC | firmware bring-up |
Validation | timing, power, throughput | latency, bugs, edge cases |
Optimization | area, thermal, clocking | memory and task optimization |
This workflow improves both hardware and software in embedded system development.
Fundamental Issues in Hardware Software Co Design
Like any advanced methodology, there are fundamental issues in hardware software co design that engineers must solve carefully.
Key Challenges
- deciding hardware vs software partitioning
- balancing latency vs flexibility
- synchronization between FPGA and firmware teams
- debugging across hardware and driver layers
- version mismatch between RTL and firmware
- limited simulation speed
- security across boot chain and trusted firmware
- verification cost in safety-critical systems
These are also the major issues in hardware software co design in embedded system projects.
A poor split can increase BOM cost, power draw, and firmware complexity.
Common Mistakes to Avoid in Hardware Software Co-Design
Even well-planned hardware software codesign in embedded systems projects can face performance and scalability issues when partitioning decisions are not handled carefully. Avoiding common mistakes early in the design phase helps reduce debugging time, lowers redesign costs, and improves long-term product reliability.
Below are some of the most common mistakes engineers face during co design in embedded systems.
1) Assigning Too Many Tasks to Firmware
A common mistake is pushing all major tasks into software because firmware updates are easier than hardware redesigns.
However, functions like:
- signal processing
- motor PWM generation
- cryptographic acceleration
- AI inference
- sensor fusion
often perform much better in dedicated hardware blocks.
Overloading firmware increases CPU usage, latency, and power consumption.
2) Overusing FPGA or Hardware Accelerators
Not every task needs FPGA logic or dedicated accelerators.
Simple control decisions, configuration management, diagnostics, and UI logic are usually better in software because they need flexibility and easier updates.
Using hardware for simple logic can increase:
- design complexity
- validation time
- BOM cost
- power draw
3) Ignoring Memory Bandwidth and Bus Bottlenecks
Many embedded teams optimize compute performance but forget memory throughput.
Even fast accelerators fail when:
- DDR bandwidth is limited
- DMA transfers are slow
- bus arbitration is poor
- cache behavior is inefficient
Memory architecture is often the hidden bottleneck in embedded system architecture design.
4) Poor Interrupt and Timing Design
Real-time systems depend heavily on deterministic timing.
Poor interrupt prioritization can cause:
- missed sensor events
- delayed motor response
- unstable control loops
- communication frame loss
This is especially critical in automotive, robotics, and medical embedded systems.
5) Weak Hardware Abstraction Layer
Without a clean HAL layer, firmware becomes tightly coupled to hardware registers.
This makes:
- portability difficult
- debugging slower
- hardware upgrades expensive
- product scaling harder
A strong abstraction layer improves reuse across MCU, SoC, and FPGA-based platforms.
6) Delayed Driver Validation
Waiting too long to validate low-level drivers often creates late-stage integration issues.
Always validate early for:
- SPI
- I2C
- CAN
- UART
- DMA
- interrupt services
- secure boot drivers
Early testing reduces risk in hw sw co design projects.
7) No Power Profiling
Power optimization should never be left until the final product stage.
Ignoring:
- sleep modes
- clock gating
- peripheral wake events
- DMA offloading
- hardware acceleration
can severely affect battery-powered IoT and wearable devices.
8) Missing Security Partition
Security must be considered during partitioning itself.
Sensitive operations such as:
- secure boot
- encryption
- key storage
- authentication
- OTA validation
should ideally be split into trusted hardware and secure firmware layers.
This is becoming increasingly important in AI edge and connected IoT products.

Real-World Applications and Examples
Here are some strong hardware software codesign examples used across industries:
Automotive ADAS
Lane detection, radar fusion, and braking decisions require:
- real-time sensor fusion
- AI acceleration
- ultra-low latency compute
- functional safety layers
This is why automotive is the largest embedded segment globally.
Industrial Automation
PLC systems and robotics use co-design for:
- motion control
- fieldbus communication
- predictive maintenance
- vibration AI analytics
Medical Devices
Portable ECG and patient monitoring devices combine:
- signal conditioning hardware
- low-noise ADCs
- embedded AI classifiers
- secure cloud firmware updates
Consumer Electronics
Smart TVs, earbuds, and cameras use co-design for:
- codec acceleration
- voice wake engines
- Bluetooth stacks
- battery optimization
AI and Edge Intelligence Are Changing the Game
A major trend in modern embedded system architecture design is AI-native co-design.
The embedded AI software market is projected to grow from USD 4.89 billion in 2025 to USD 14.81 billion by 2033, showing how edge inference is reshaping system design.
This means future hw sw co design engineers must understand:
- TinyML deployment
- NPU integration
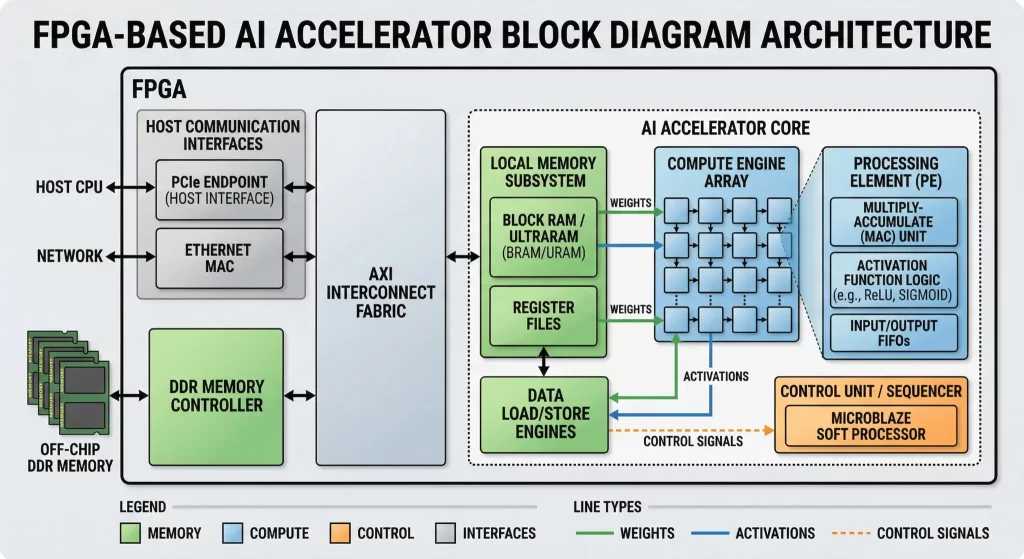
- FPGA AI pipelines
- memory bandwidth optimization
- neural network quantization
- edge security
- low-power AI scheduling
Products are now increasingly designed around local intelligence, not just firmware logic.
Future Trends in Hardware Software Co-Design
The future of hardware software codesign in embedded systems is moving toward adaptive, AI-aware architectures.
Key Trends
- RISC-V customizable SoCs
- FPGA-based edge AI
- chiplet-based modular designs
- secure enclaves and trusted boot
- virtual prototyping
- cloud-assisted simulation
- AI-generated firmware optimization
- model-based code generation
- digital twins for embedded validation
These trends are especially important in:
- autonomous vehicles
- robotics
- aerospace
- industrial IoT
- smart healthcare
- wearable AI devices
Skills Required for Future Engineers
The role of an hw sw co design engineer is becoming one of the most valuable in embedded careers.
Important skills include:
- Embedded C/C++
- Verilog / VHDL
- RTOS
- FPGA prototyping
- ARM / RISC-V architecture
- Linux device drivers
- AI model deployment
- SystemC / MATLAB modeling
- power profiling
- security architecture
This role bridges semiconductor logic and application intelligence.
Conclusion
The future of intelligent devices depends heavily on hardware software codesign in embedded systems. As systems become more AI-driven, connected, and performance-sensitive, designing hardware and software in isolation is no longer efficient.
A unified approach improves speed, power efficiency, latency, security, and scalability.
Whether building IoT devices, automotive electronics, robotics platforms, or AI edge products, co-design creates the foundation for reliable and future-ready innovation.
For engineers and students, mastering this approach is no longer optional, it is becoming a core skill for next-generation embedded development.